Ingeniería Precisa.
Movimiento Inteligente.
Diseñando el futuro de la robótica autónoma con Arduino.
Explora nuestro Proceso
Diseñando el futuro de la robótica autónoma con Arduino.
Explora nuestro Proceso
Definición del objetivo de crear un carro que se mueva hacia adelante. Aprendizaje de los conceptos básicos del lenguaje de programación de Arduino, incluyendo la estructura, el orden y la declaración de variables, para sentar las bases del control del vehículo.
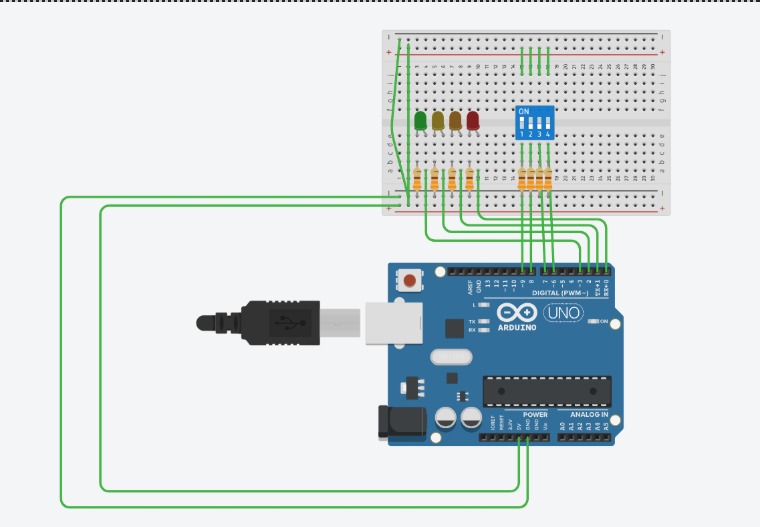
Precisión en cada conexión.
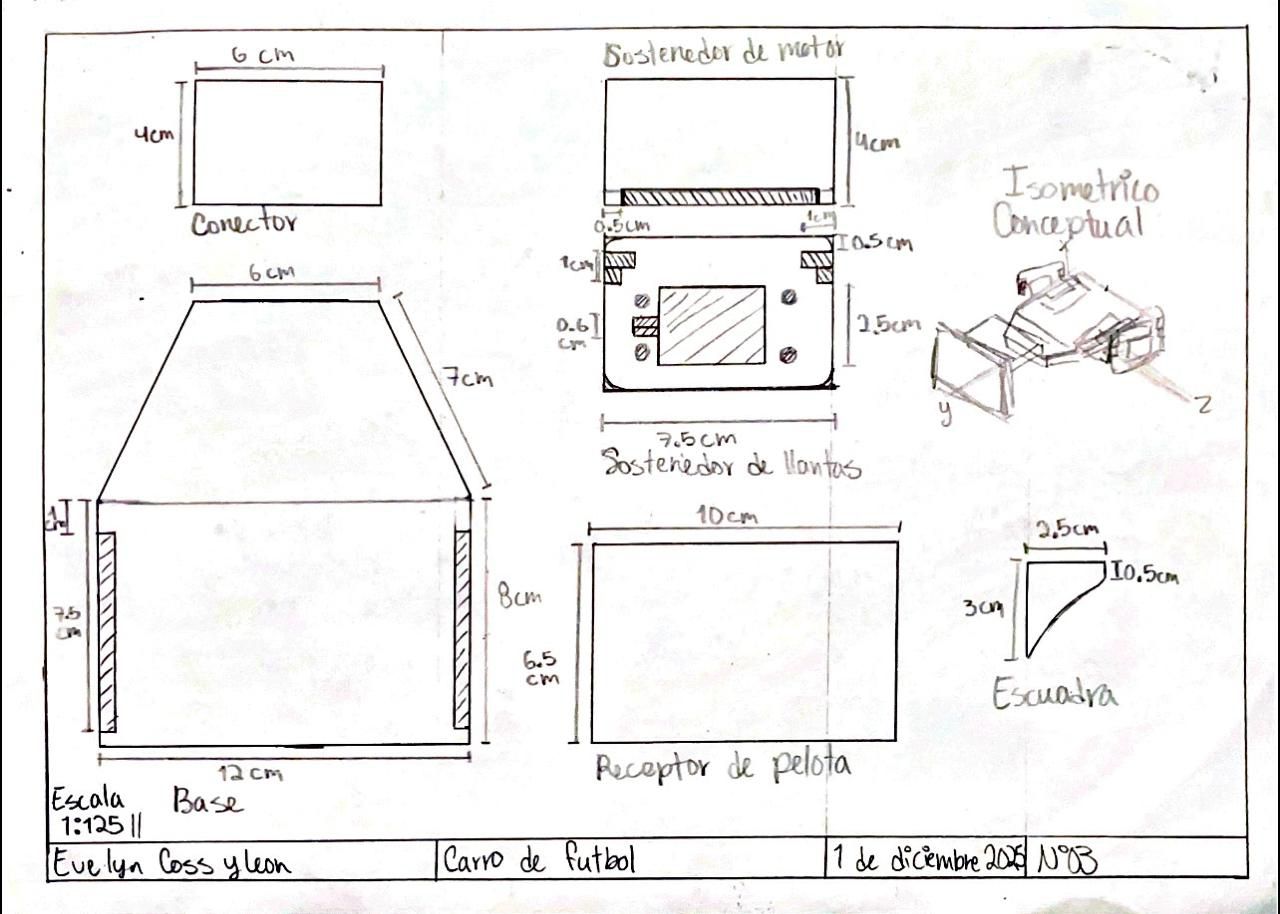
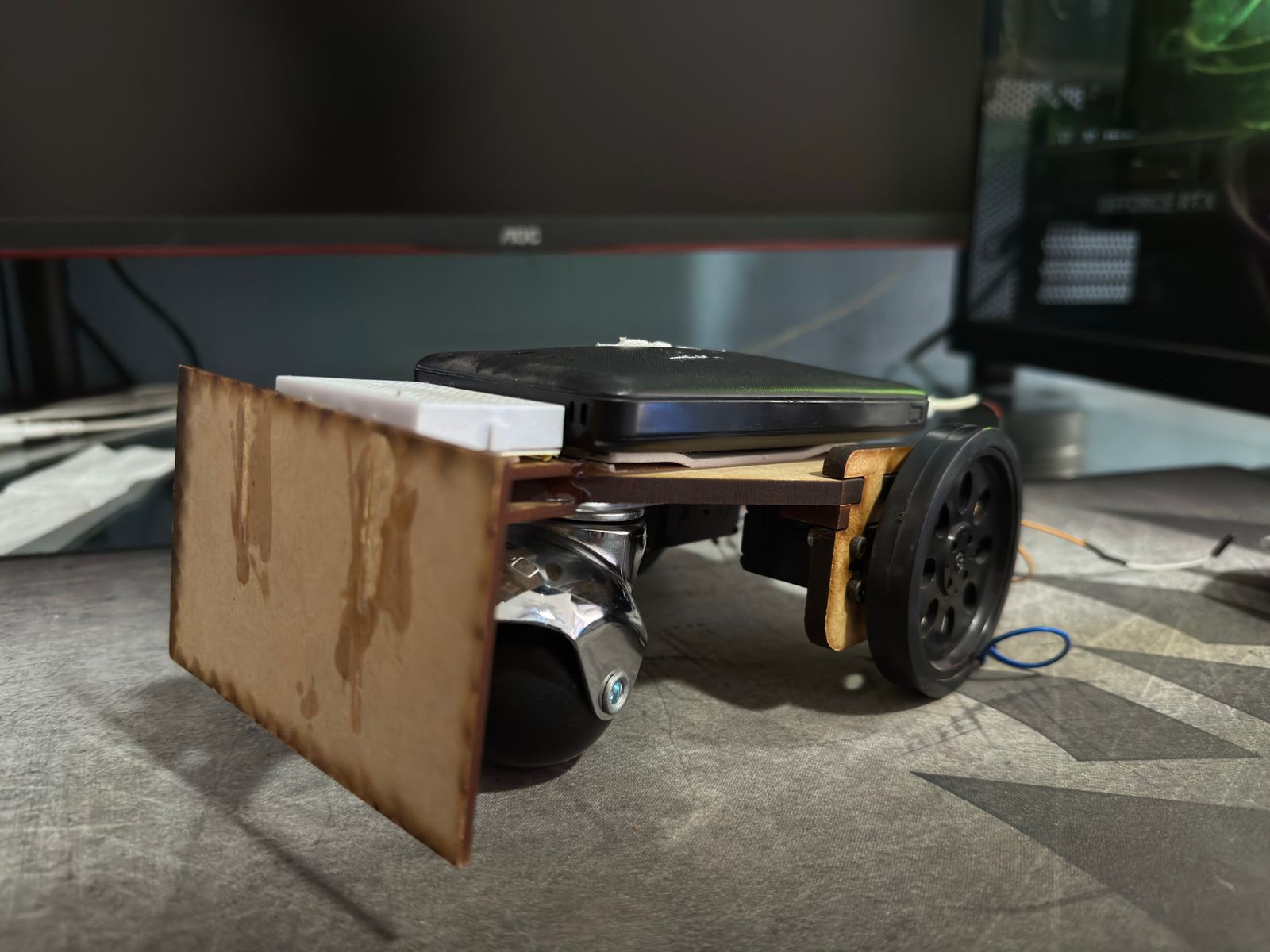
Creación del diseño del vehículo y su construcción física, utilizando componentes como motores y una base, para lograr la movilidad hacia adelante. Esto implica el ensamblaje y la conexión de todos los elementos para que el hardware del carro sea funcional.
Inteligencia en cada línea.
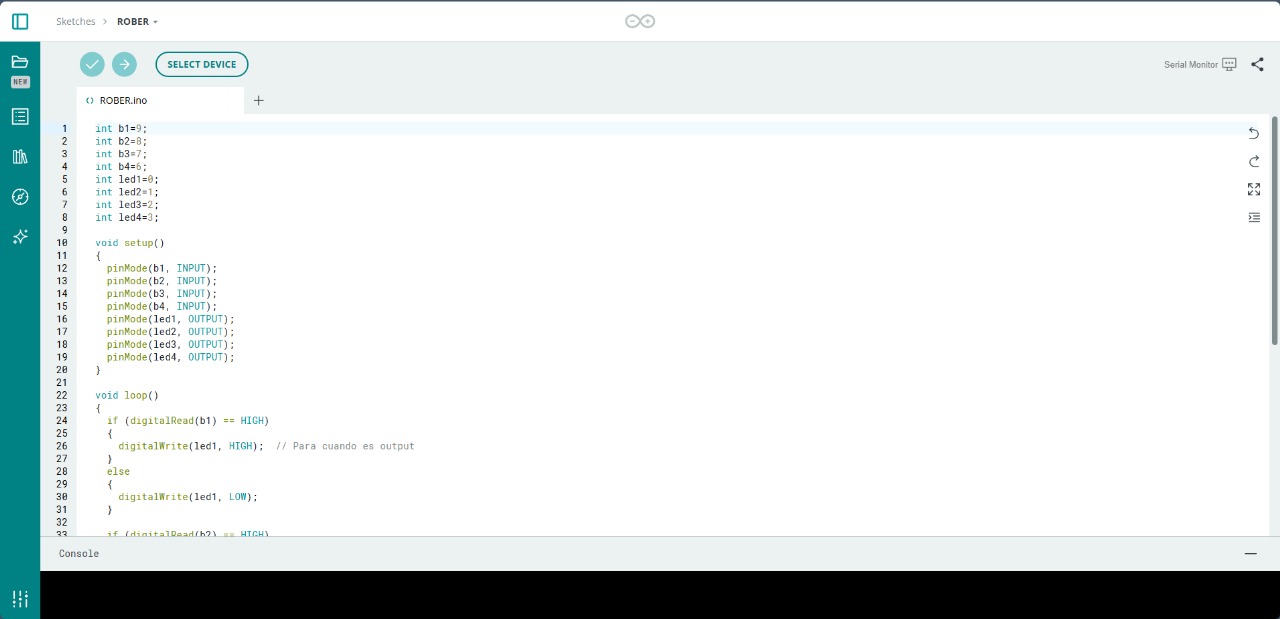
Programación del firmware en Arduino para controlar el carro. Implementación de un código base de vehículo que permita mover el carro hacia adelante y detenerse, utilizando funciones y variables que controlen el movimiento.
Rendimiento sin compromisos.

Pruebas del carro físico para verificar que se mueve correctamente hacia adelante según lo planeado. Identificación y corrección de errores en el código o en el ensamblaje mecánico para asegurar el funcionamiento óptimo según el objetivo planteado.